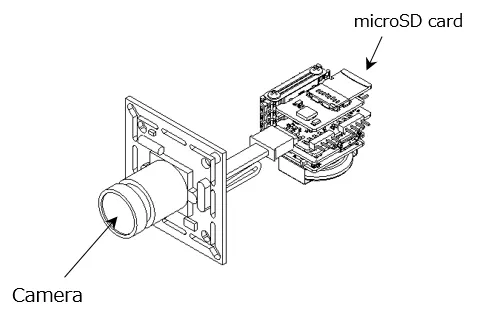
カメラの撮影
Seeed Studio の Grove シリーズのセンサを利用した例。定点観測用カメラ。1分に一回カメラで撮影した画像をmicroSDカードに保存してみよう。
使用するリーフ
Section titled “使用するリーフ”| Type | Name | Q’ty |
|---|---|---|
| AZ62 | Connector Cover | 1 |
| AZ02 | RTCµSD | 1 |
| AX04 | Spacer | 1 |
| AX06 | Grove&5V | 1 |
| AP01 | AVR MCU | 1 |
| AZ01 | USB | 1 |
| AV01 | CR2032 | 1 |
| CR2032 coin cell battery | 1 | |
| Grove-Serial Camera Kit | 1 | |
| microSD card | 1 | |
| M2*18mm screw | 2 |
リーフの組み立て
Section titled “リーフの組み立て”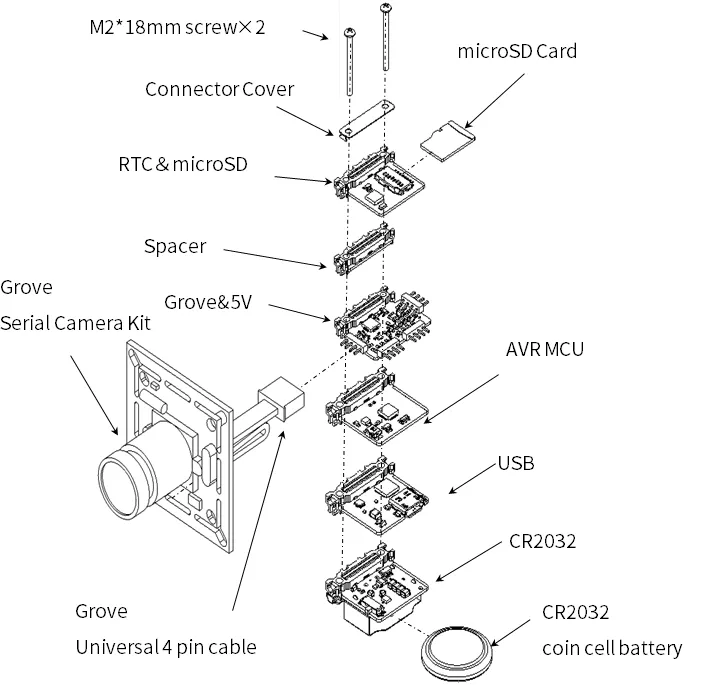
ソースコード
Section titled “ソースコード”- 書き込みには、4-Sensors、AVR MCUライブラリ(タイマ割り込み)が必要です。予め、ライブラリをインクルードしておいてください。詳しくは、こちら。
- Arduino IDEで下記のプログラムを書きましょう。
//=====================================================================// Leafony Platform sample sketch// Platform : Grove + Camera// Processor : ATmega328P (3.3V /8MHz)// Application : Camera//// Leaf configuration// (1) AP01 AVR MCU// (2) AX01 Grove&5V + Grove Serial Camera Kit// (3) AZ01 USB// (4) AZ02 RTC&MicroSD//// (c) 2021 LEAFONY SYSTEMS Co., Ltd// Released under the MIT license// https://opensource.org/licenses/MIT//// Rev.00 2021/04/01 First release//=====================================================================//use libraries//=====================================================================
//=====================================================================// difinition//=====================================================================#include <MsTimer2.h>#include <SPI.h>#include <SD.h>#include <SoftwareSerial.h>#include <avr/wdt.h>#include <avr/sleep.h>#include <avr/power.h>//=====================================================================
#define DEBUG
//=====================================================================// SPI CLOCK// SDカードのSPI I/Fのクロック速度4Mでは動作しないので4M以下に設定すること//=====================================================================#define SD_CLCK 2500000
//=====================================================================// 撮影間隔(秒)////=====================================================================#define SNAP_WAIT 60
//=====================================================================// IOピンの名前定義// 接続するリーフに合わせて定義する//=====================================================================// --------------------------------------------// PD port// digital 0: PD0 = PCRX (HW UART)// digital 1: PD1 = PCTX (HW UART)// digital 2: PD2 = INT0#// digital 3: PD3 = INT1#// digital 4: PD4 = RSV// digital 5: PD5 = RSV// digital 6: PD6 = RSV// digital 7: PD7 = RSV// --------------------------------------------#define PCTX 0#define PCRX 1#define INT0 2#define INT1 3#define RSV_D4 4#define RSV_D5 5#define SD_EN 6#define RSV_D7 7
// --------------------------------------------// PB port// digital 8: PB0 = UART2_RX (software UART) /* not use */// digital 9: PB1 = UART2_TX (software UART) /* not use */// digital 10:PB2 = CS#// digital 11:PB3 = MOSI// digital 12:PB4 = MISO// digital 13:PB5 = SCK (AVR LED)// PB6 = XTAL1// PB7 = XTAL2//---------------------------------------------#define UART2_RX 8#define UART2_TX 9#define SD_CS 10#define MOSI 11#define MISO 12#define LED_PIN 13
// --------------------------------------------// PC port// digital 14/ Analog0: PC0 = RSV// digital 15/ Analog1: PC1 = CAMERA TX (software UART)// digital 16/ Analog2: PC2 = CAMERA RX (software UART)// digital 17/ Analog3: PC3 = RSV// digital 18/ SDA : PC4 = SDA (I2C)// digital 19/ SCL : PC5 = SCL (I2C)// RESET : PC6 = RESET#//-----------------------------------------------#define RSV_D14 14#define UART3_TX 15#define UART3_RX 16#define RSV_D17 17#define SDA 18#define SCL 19//=====================================================================
//=====================================================================// camera//=====================================================================//Color Setting#define COLOR_2BIT_GRAY 0x01#define COLOR_4BIT_GRAY 0x02#define COLOR_8BIT_GRAY 0x03#define COLOR_2BIT_COLOR 0x05#define COLOR_4BIT_COLOR 0x06#define COLOR_JPEG 0x07//Preview Resolution#define PRE_RES_80_60 0x01#define PRE_RES_160_120 0x03//JPEG Resolution#define JPEG_RES_80_60 0x01#define JPEG_RES_QQVGA 0x03#define JPEG_RES_QVGA 0x05#define JPEG_RES_VGA 0x07//Get Setting#define GET_SNAPCHOT 0x01#define GET_PRE_PIC 0x02#define GET_PRE_JPEG 0x03//Snapshot Setting#define COMPRESSED 0x00#define UNCOMPRESSED 0x01//data length#define PIC_PKT_LEN 128
//=====================================================================// SD//=====================================================================File myFile;SoftwareSerial CameraSerial(UART3_RX, UART3_TX);
//=====================================================================// 変数定義//=====================================================================unsigned long picTotalLen = 0; // picture lengthint picNameNum = 0;char fname[16];
//---------------------------// interval Timer2 interrupt//---------------------------volatile bool bInterval = false;volatile int intcnt = 0;
//=====================================================================// setup//=====================================================================//-----------------------------------------------// port//-----------------------------------------------//=====================================================================// IOピンの入出力設定// 接続するリーフに合わせて設定する//=====================================================================void setupPort(){
//--------------------- // PD port //--------------------- // PD0 : digital 0 = RX // PD1 : digital 1 = TX
pinMode(INT0, INPUT); // PD2 : digital 2 = INT0# pinMode(INT1, INPUT); // PD3 : digital 3 = INT1#
pinMode(RSV_D4, OUTPUT); // PD4 : digital 4 = LED digitalWrite(RSV_D4, LOW);
pinMode(RSV_D5, OUTPUT); // PD5 : digital 5 = not used digitalWrite(RSV_D5, LOW);
pinMode(SD_EN, OUTPUT); // PD6 : digital 6 = BLE reset active-low digitalWrite(SD_EN, HIGH);
pinMode(RSV_D7, OUTPUT); // PD7 : digital 7 = BLE sleep digitalWrite(RSV_D7, HIGH);
//--------------------- // PB port //--------------------- pinMode(UART2_RX, OUTPUT); // PB0 : digital 8 = software UART2 digitalWrite(UART2_RX, LOW);
pinMode(UART2_TX, OUTPUT); // PB1 : digital 9 = software UART2 digitalWrite(UART2_TX, LOW);
//--------------------- // PC port //--------------------- pinMode(RSV_D14, OUTPUT); // PC0 : digital 14 = not used digitalWrite(RSV_D14, LOW);
// PC1 : digital 15 = Camera RX // PC2 : digital 16 = Camera TX
pinMode(RSV_D17, OUTPUT); // PC3 : digital 17 = not used digitalWrite(RSV_D17, LOW);
// PC4 : digital 18 = I2C SDA // PC5 : digital 19 = I2C SCL}//=====================================================================// 割り込み処理////=====================================================================//-----------------------------------------------// timer2 interrupt (interval=1000ms, int=overflow)// メインループのタイマー割り込み設定//-----------------------------------------------void setupTC2Int(){
MsTimer2::set(1000, intTimer2);}
//----------------------------------------------// Timer2 INT// タイマー割り込み関数//----------------------------------------------void intTimer2(){ intcnt++; if (intcnt > SNAP_WAIT) { intcnt = 0; bInterval = true; }}//====================================================================// camera//====================================================================//----------------------------------------------// clearReadBuf// カメラデータの受信バッファクリア//----------------------------------------------void clearReadBuf(){ while (CameraSerial.available()) { CameraSerial.read(); }}//----------------------------------------------// sendCmd// カメラへのコマンド送信//----------------------------------------------void sendCmd(char cmd[], int cmd_len){ for (char i = 0; i < cmd_len; i++) CameraSerial.write(cmd[i]);}//----------------------------------------------// readRespons// カメラからのデータ受信//----------------------------------------------int readRespons(char *dest, int len, unsigned int timeout){ int read_len = 0; unsigned long t = millis();
while (read_len < len) { while (CameraSerial.available()<1) { if ((millis() - t) > timeout) { //Serial.println("timeout"); return read_len; } } *(dest+read_len) = CameraSerial.read();#ifdef DEBUG //Serial.write(*(dest+read_len),); //debug#endif read_len++; } return read_len;}//----------------------------------------------// initialize// カメラとの通信確立//----------------------------------------------void initialize(){ char cmd[] = {0xaa,0x0d,0x00,0x00,0x00,0x00} ; unsigned char resp[6];
Serial.print("initializing camera...");
while (1) { sendCmd(cmd,6); if (readRespons((char *)resp, 6,1000) != 6) { Serial.print("."); continue; } if (resp[0] == 0xaa && resp[1] == 0x0e && resp[2] == 0x0d && resp[4] == 0 && resp[5] == 0) { if (readRespons((char *)resp, 6, 500) != 6) continue; if (resp[0] == 0xaa && resp[1] == 0x0d && resp[2] == 0 && resp[3] == 0 && resp[4] == 0 && resp[5] == 0) break; } } cmd[1] = 0x0e; cmd[2] = 0x0d; sendCmd(cmd, 6); Serial.println(" done.\r\n");}//----------------------------------------------// preCapture// カメラの初期設定//----------------------------------------------void preCapture(){ char cmd[] = { 0xaa, 0x01, 0x00, COLOR_JPEG, PRE_RES_80_60, JPEG_RES_VGA }; unsigned char resp[6];
while (1) { clearReadBuf(); sendCmd(cmd, 6); if (readRespons((char *)resp, 6, 100) != 6) continue; if (resp[0] == 0xaa && resp[1] == 0x0e && resp[2] == 0x01 && resp[4] == 0 && resp[5] == 0) break; }}
//----------------------------------------------// Capture// カメラの撮影実施//----------------------------------------------void Capture(){ char cmd[] = { 0xaa, 0x06 , 0x08, PIC_PKT_LEN & 0xff, (PIC_PKT_LEN>>8) & 0xff ,0}; unsigned char resp[6];
while (1) { clearReadBuf(); sendCmd(cmd, 6); if (readRespons((char *)resp, 6, 100) != 6) continue; if (resp[0] == 0xaa && resp[1] == 0x0e && resp[2] == 0x06 && resp[4] == 0 && resp[5] == 0) break; } cmd[1] = 0x05; cmd[2] = 0; cmd[3] = 0; cmd[4] = 0; cmd[5] = 0; while (1) { clearReadBuf(); sendCmd(cmd, 6); if (readRespons((char *)resp, 6, 100) != 6) continue; if (resp[0] == 0xaa && resp[1] == 0x0e && resp[2] == 0x05 && resp[4] == 0 && resp[5] == 0) break; } cmd[1] = 0x04; cmd[2] = GET_SNAPCHOT; while (1) { clearReadBuf(); sendCmd(cmd, 6); if (readRespons((char *)resp, 6, 100) != 6) continue; if (resp[0] == 0xaa && resp[1] == 0x0e && resp[2] == 0x04 && resp[4] == 0 && resp[5] == 0) { if (readRespons((char *)resp, 6, 1000) != 6) { continue; } if (resp[0] == 0xaa && resp[1] == 0x0a && resp[2] == 0x01) { picTotalLen = (resp[3]) | (resp[4] << 8) | (resp[5] << 16); //Serial.print("picTotalLen:"); //Serial.println(picTotalLen); break; } } }
}
//----------------------------------------------// GetData// カメラからデータを取得しSDに書き込む//----------------------------------------------void GetData(){ char cmd[] = { 0xaa, 0x0e , 0x00, 0x00, 0x00, 0x00 }; unsigned char pkt[PIC_PKT_LEN]; unsigned int pktCnt = (picTotalLen) / (PIC_PKT_LEN - 6);
if ((picTotalLen % (PIC_PKT_LEN-6)) != 0) pktCnt += 1;
set_filename(); if (SD.exists(fname)) { SD.remove(fname); } myFile = SD.open(fname, FILE_WRITE); if(!myFile){ Serial.println("myFile open fail..."); } else{ Serial.print("Saving ");Serial.print(fname); Serial.print("..... "); for (unsigned int i = 0; i < pktCnt; i++) { cmd[4] = i & 0xff; cmd[5] = (i >> 8) & 0xff;
int retry_cnt = 0; retry: delay(10); clearReadBuf(); sendCmd(cmd, 6); uint16_t cnt = readRespons((char *)pkt, PIC_PKT_LEN, 200);
unsigned char sum = 0; for (int y = 0; y < cnt - 2; y++) { sum += pkt[y]; } if (sum != pkt[cnt-2]) { if (++retry_cnt < 100) goto retry; else break; }
myFile.write((const uint8_t *)&pkt[4], cnt-6); //if (cnt != PIC_PKT_LEN) break; } cmd[4] = 0xf0; cmd[5] = 0xf0; sendCmd(cmd, 6); } myFile.close(); Serial.println("end!!");}
//----------------------------------------------// set_filename// SDに書き込みファイ名を作成IMGxxxx.JPG//----------------------------------------------void set_filename(){ sprintf(fname, "IMG%04d.JPG", picNameNum); picNameNum ++; if( picNameNum > 100 ){ picNameNum = 0; // Overwrite }}//====================================================================// setup//====================================================================void setup() { //WDT disable wdt_disable();
//内部の各モジュールの電源OFF //power_all_disable(); //power_timer0_enable(); //power_timer2_enable(); //power_spi_enable(); //power_usart0_enable();
delay(10);
Serial.begin(115200); CameraSerial.begin(9600);
#ifdef DEBUG Serial.println("========================================="); Serial.println("setup start"); #endif
setupPort(); delay(10); setupTC2Int();
if (!SD.begin(SD_CLCK,SD_CS)) { Serial.print("sd init failed"); return; } Serial.print("sd init finish\r\n"); initialize(); delay(1); preCapture(); delay(1000); Capture(); GetData(); MsTimer2::start();
}//====================================================================// loop//====================================================================void loop() {
if (bInterval == true) { bInterval = false; Capture(); GetData(); }}